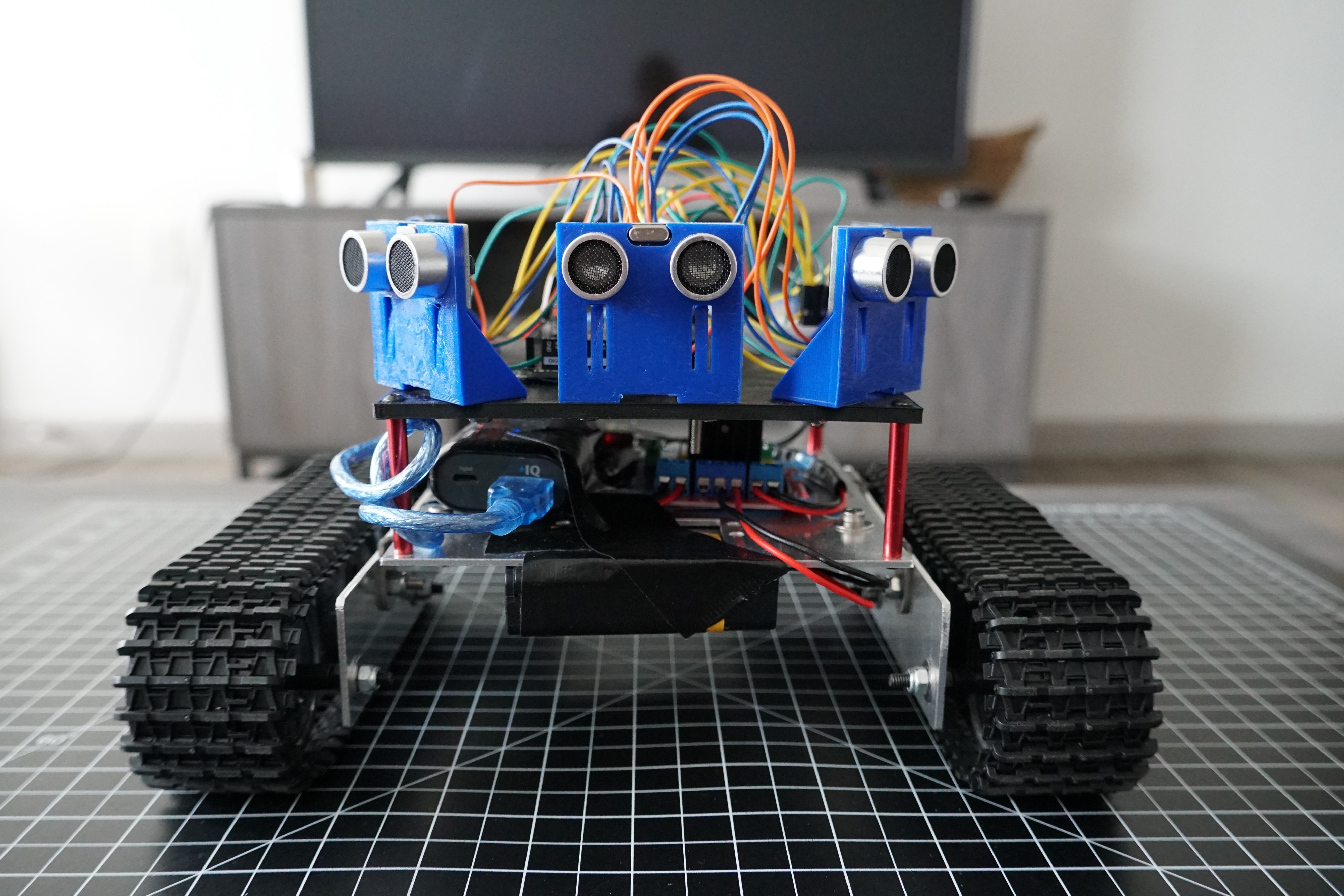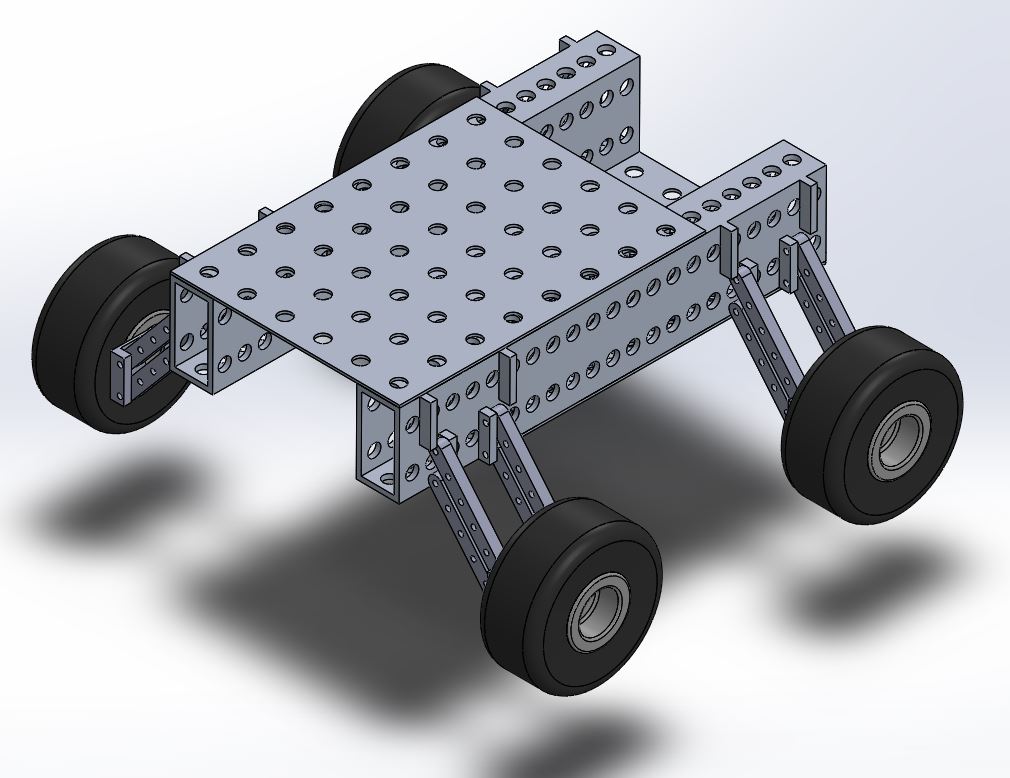
Simulation of Unmanned Ground Vehicle (UGV)
This is an ongoing undergraduate research project that simulates the dynamics and physics of a real UGV using URDF files, ROS, and Gazebo.
The applications of this project include the rapid testing and refinement of obstacle-avoidance algorithms without the need for real-world testing.